Elképesztő képességű focizó humanoid robotok
A mesterséges intelligencia által vezérelt mély megerősítő tanulással kiképzett humanoid robotok új szintre emelték a labdarúgást, gyorsabbak és ügyesebbek, mint a hagyományosan programozott társaik. A NewScientist szerint ezek a gépek gyorsabban tudnak járni, labdába rúgni és felállni, mint a korábbi robotok.
Guy Lever, a Google DeepMind munkatársa és csapata 240 órás mély megerősítő tanulással állították be a Robotis OP3 típusú robotokat, melyek 50 centiméter magasak és 20 ízülettel rendelkeznek. A mély megerősítő tanulás a megerősített tanulás és a mélytanulás elveit ötvözi, ahol a robotok próbálkozások és tévedések révén tanulnak, és neurális hálózatok segítségével elemzik az adatokat.
A kutatók szerint a mély megerősítő tanulással kiképzett robotok 181%-kal gyorsabban tudnak járni, 302%-kal gyorsabban fordulni, 34%-kal erősebben rúgni a labdát, és 63%-kal gyorsabban felállni, mint az előre programozott készségekkel rendelkező robotok. Lever szerint ezeket a viselkedéseket nehéz lenne manuálisan megtervezni.
Jonathan Aitken, a Sheffieldi Egyetem kutatója szerint a kutatás előremozdítja a robotika területét, és a szimuláció és a valóság közötti szakadék megszüntetésével foglalkozik. A Google DeepMind által javasolt megoldásban egy fizikai motort használnak a betanítási esetek szimulálására, amelyeket aztán a neurális hálózat elemz.
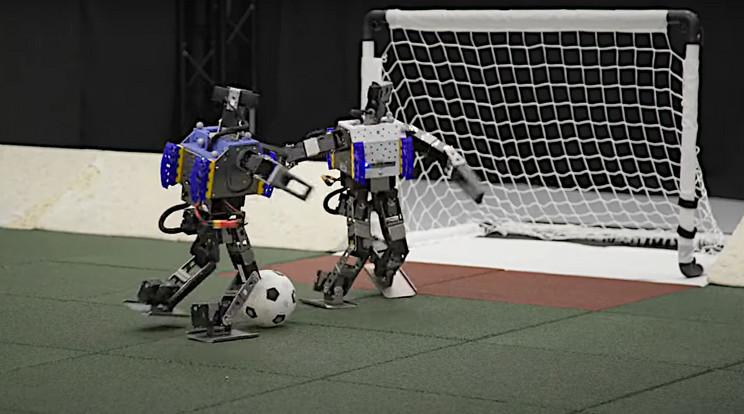
A virtuális robotok után a rendszert több Robotis OP3 robotra is átültették, és egy olyan szoftvert adtak hozzá, amely lehetővé tette a robotok számára, hogy tanuljanak és fejlődjenek, miközben először az egyéni képességeiket tesztelték, majd egymás ellen játszottak. Aitken szerint a cél nem a Premier League-ben játszó robotok létrehozása, hanem az összetett robotkészségek gyors felépítésének megértése és a valós munkaalkalmazásokba való átültetése.
A Google DeepMind kutatói a mély megerősítő tanulást alkalmazva miniatűr robotokat próbáltak megtanítani focizni, és arra, hogy egy az egy ellen játszanak mérkőzéseket. A szimulált és a fizikai világban végzett kísérletek eredményeit a Science Robotics című tudományos szaklapban publikálták. A robotok képesek voltak hárítani az ellenfél lövését, és előre jelezni, hogy merre fog mozogni a labda. A szakemberek szerint a szimulált környezetben lejátszott mozgási stratégiát nagyon könnyen sikerült átültetni a valós robotokra. Ezek a fejlesztések lehetővé teszik, hogy a humanoid robotokat biztonságos mozgásra, valamint egy dinamikus környezetben is kifinomult mozgásra lehessen megtanítani.